
ArduCopter 3.0.1 has been released and is now available in the Mission Planner, GitHub and the new Downloads Area.
Improvements over 2.9.1b include:
- Warning #1: Compass calibration and reducing interference is far more important than with 2.9.1b
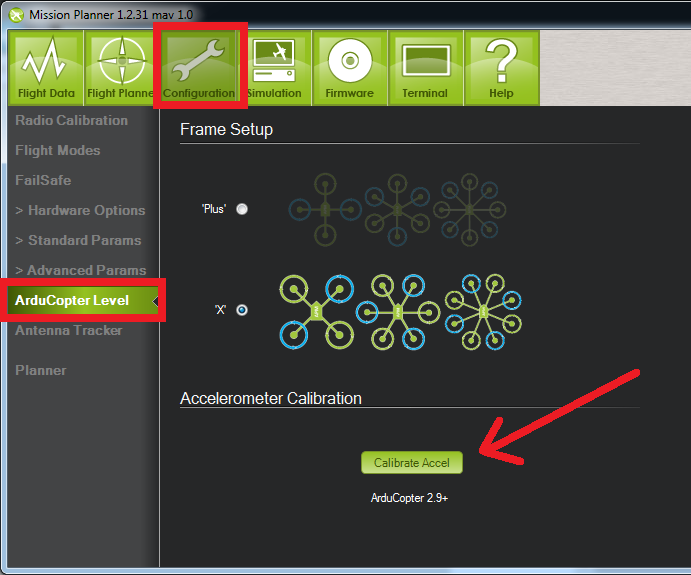
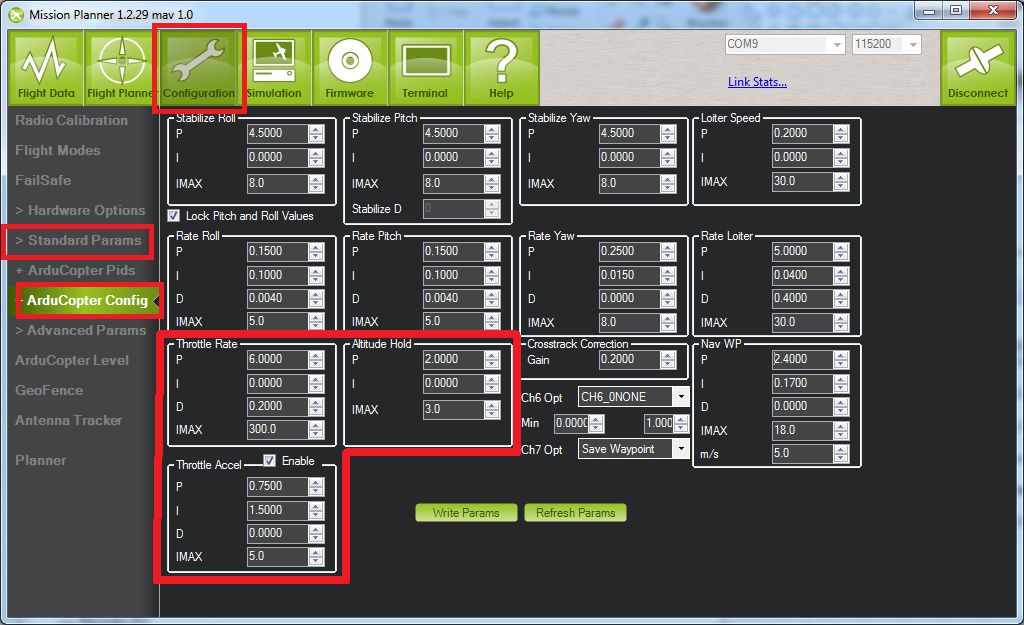
- Warning #2: GPS glitches can cause sudden and aggressive position changes while in loiter mode. You may wish to reduce the Loiter PID P to 0.2 (from 1.0) to reduce aggressiveness (see image below of where this gain can be found in mission planner).
- Warning #3: optical flow is not supported but will be back in the next release (AC-3.0.2 or AC-3.1.0).
- Warning #4: This release has only been lightly tested on Traditional Helicopters.
Improvements over 2.9.1b include:
- Inertial Navigation for Loiter and Auto meaning much more accurate control (Randy,Leonard,JonathanC)
- 3D navigation controller follows straight lines in all dimensions between waypoints (Leonard,Randy)
- "compassmot" to compensate for interference on compass from the pdb, motors, ESCs and battery. (Randy,JonathanC) (Set-up video here)
- Safety improvements:
- simple Tin Can shaped Geo Fence
- pre-arm checks to ensure all calibration has been performed before arming (can be disabled by setting ARMING_CHECK to zero). (video description here)
- GPS failsafe - switches to LAND if GPS is lost for 5 seconds
- stability patch improvements to stop rapid climbs in very overpowered or overtuned copters
- Circle mode improvements including "panorama" when CIRCLE_RADIUS set to zero (Randy,Leonard)
- SONAR_GAIN parameter added to allow better tuning of sonar surface tracking
- CH8 auxiliary switch (same features as CH7)
- works on PX4 (some minor features still not available) (Tridge,PatH)




 RSS Feed
RSS Feed