
IRIS+ Support
|
If you are having trouble with your IRIS+ quadcopter it's best to contact your local dealer or the shop you purchased it from i.e.
|
For more information about flight modes, further instructions, and
configuration tutorials, visit the APM:Copter community documentation project at copter.ardupilot.com. APM:Copter is the firmware that controls your Iris Quadcopter. For details about teh mission planner please go here. |
Troubleshooting
|
Q - I am receiving a persistent error indication when arming.
A - See Mission Planner for the specific error in the pre-arm safety check and visit this page for more information Q - My transmitter doesn’t have six available switch positions.
A - Consult your transmitter’s documentation for mixing two three-position switches into six position options. For more information go here |
Q - I am having trouble taking off or hovering, or my transmitter’s throttle stick is not functioning properly.
A - Perform the throttle-mid configuration procedure described here Q - I cannot update the firmware.
A - Make sure you have installed the latest Mission Planner MSI file from here |
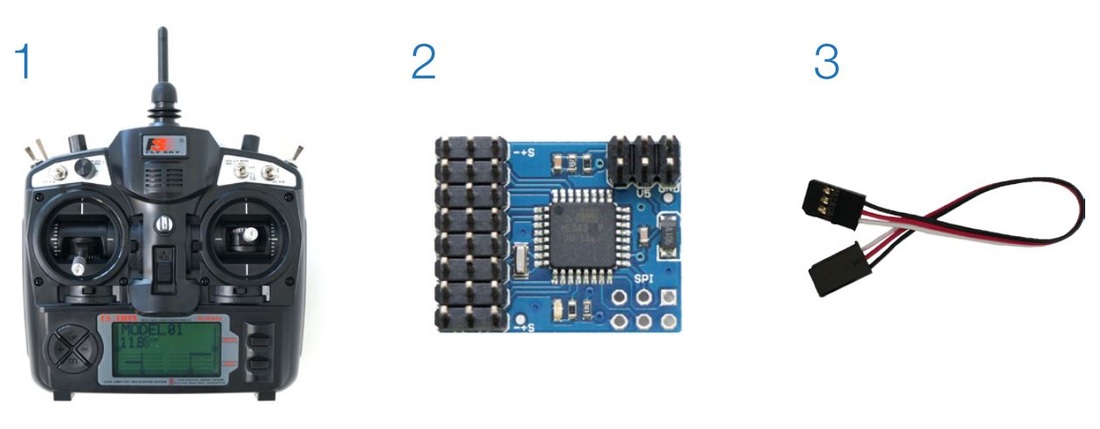
IRIS+ Parts
|
|

|

|

|
|
Specifications
|

|