What do I need for my Arducopter multi-rotor UAV?
There are many different options that you can choose from to customise your arducopter. The arducopter parts/componends are listed as required and optional. The required parts are essential for you to have a basic arducopter UAV, that can fly autonomously to way-points. The optional add-ons are things that will enhance your arducopter with additional sensors for improved performance.
|
|
Required
|
Optional Extras
|
       |











Required - ArduPilot Mega/Pixhawk
The most important part of your arducopter is the flight controller. There are currently two main boards to choose from, APM2.6 or Pixhawk. The flight controller keeps your multi-rotor stable while you are flying in manual mode, and can take over to fly to 3D waypoints when you fly in autonomous mode. There are two options for your control board as shown below. Please note that both of the ardupilot mega boards run the same software
ArduPilot Mega v2.6
Ardupilot Mega 2.6 is the newest version of the ardupilot mega hardware, it runs the same arducopter software but features some newer sensors like the MPU-6000. Its suggested that you also use a APM power module with this.
|
Pixhawk
Pixhawk is a powerful 32bit autopilot. It features advanced processor and sensor technology and runs NuttX real-time operating system, delivering incredible performance, flexibility, and reliability for controlling any autonomous vehicle.
|
All In One Pro
Although its recommended that you use official ardupilot boards, its not a requirement. You can still use arducopter with other 3rd party boards, one of which is the crius all in one pro board. This is essentially a port of the arducopter code that is compatible with other hardware. One of the great features of open source hardware!
|
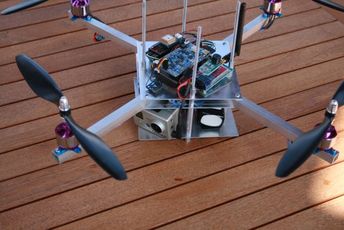
Required - Multi-Rotor Frame
A multi-rotor frame is obviously required as this will carry all of your gear like a camera or anything else you want. There is a huge selection of different frames that you can choose from, but if you are using a custom frame you will most liekly need to tweak the PID settings to get it to fly smoothly. The Arducopter software comes with the default PID settings for the arducopter frame which does not require any tweaking. With all frames you will need to have motors and speed controllers (ESC), some frames like the arducopter 3dr kit comes with the motors and ESC.
Official Arducopter Frame
The arducopter quadcopter frame is the official frame for the arducopter project, and is very strong. The nice thing about this frame is that the PID settings on the software are setup for this frame (if you are using default 850Kv motors) This frame also comes as a arducopter kit with motors and ESC included
|
Other Multicopter Frames
If you prefer to build your own quadcopter (or hexa/octa etc..). Arducopter can easily power other frames, even frames that you build yourself. This is recommended for more experienced users who are happy to tweak PID settings for the various frames. Some of the popular frame kits also include PID settings so you can quickly get in the air.
|
Required - Motors/ESC/Props
Selecting the appropriate motors, ESC and props for your arducopter may be a challenging task for those who are inexperienced, so if you are unsure its always best to purchase a frame kit that includes the suggested motors/ ESC and propellers. If you are unsure you can also purchase some motor, ESC, and propellers combos
Arducopter Motors
The motor rotates the propeller to produce thrust to lift your arducopter. For multi-rotors 800-1100Kv motors are recommended when using a 3 cell lipo.
|
ESC (speed controller)
ESC are used to control the brushless motors and are rated in terms on Amps, the amp rating of your ESC will need to match that of the motor you are using
|
Propeller
Multi-rotors generally use large propellers, 10x45, and 12x47 are the most popular. Propellers can also be made of different materials, where glass reinforced propellers are stronger.
|
Required - Radio Transmitter and Reciever
Transmitter
A radio is used to control your arducopter when flying in manual or simple modes, it is also used as a backup when you are flying in auto mode. 2.4Ghz is the most popular frequency to use. You will need at least a 6ch radio in order to use most of the features of arducopter, however more channels is suggested.
|
Reciever
The receiver is what is onboard your arducoper and receives the signal/commands from your transmitter. This is usually included when you purchase your transmitter, however having a few more are handing if you have multiple aircraft.
|
Required - Battery and Charger
Battery
The battery is a very important aspect of your arducopter since it provides all the power for the flight controller and motors. Lithium Polymer batteries (lipo) are the most common and provide a very good power to weigt ratio. The battery you require depends on the motors/ESC that you are using, but for the standard Arducopter 3DR kit, a 3 cell lipo (11.1V) of at least 2200mah is ideal.
|
Charger
In order to charge your Lipo battery, you will need a special balance charger that makes sure that each cell has the correct voltage. There are a variety of chargers on the market ranging from basic and cheap, to feature packed and very expensive, the choice is up to you on what you want to get.
|
Optional - Wireless Telemetry and ground control station (laptop)

|
Adding wireless telemetry to your arducopter will greatly extend the capabilities of your UAV. You can use the ground control station and the telemetry kit to monitor your flight, or upload new mission commands during a flight. To do this you will need a laptop computer that you can use when you are flying in remote areas. In the UK and most of Europe 2.4Ghz are the only legal frequency to use, this gives range of about 1.5Km. In other parts of the world 900Mhz is preferred as it has greater range.

|
Optional - Extra Sensors
There are a bunch of extra accessories that you can add onto your arducopter for additional features, however some of the sensors listed below can enhance performance of your arducopter.
Ultrasonic Sensor (Sonar)
The Maxbotics Ultrasonic Range-finders are used to help with your arducopter altitude hold at low altitudes (under 10m), above 10m the built in barometer is used.
With the latest arducopter firmware, a sonar is no really needed to improved altitude hold. However you can always use a sonar to keep an exact height above the ground, rather than the absolute altitude provided by GPS/pressure sensor/ |
Optical Flow Sensor
The Optical Flow Sensor is used to help with position hold at low altitudes. This sensor is based on an optical mouse sensor and helps hold a very precise hover.
This is only realy idea if you plan to use your quadcopter in GPS denied enviroments. |
Battery Alarm
The battery alarm is a fairly important accessory for your arducopter, it will warn you when the battery is low so you can land. This sensor will flash a light when the battery is getting low, and siglan a audable alarm when the battery level is critical so you know when to land before the battery dies.
|
Optional - Stabilised Camera Gimbal
|
If you are going to be using your arducopter as a camera platform, you will probably be interested in using a camera gimbal. A camera gimbal helps keep your video/photo stable and level when your arducopter is flying around fighting the wind. Arducopter supports stabilisation of a roll/tilt camera gimbal. There are a variety of gimbal mounts that you can use, and they all depend on which frame and camera you are using.
|

|
Optional - Wireless Video (FPV)
|
You can also add a wireless video feed to your arducopter that will let you fly FPV (first person viiew) style. Because you are probably using a 2.4Ghz radio to control your arducopter you should use a 5.8Ghz wireless video feed. In the UK you are limited to 25mW video transmitters which can sometimes limit the maximum range. However 25mW is still great for arducopter.
|
|
Optional - On Screen Display (OSD)
|
OSD modules, allow you to overlay usefull information from arducopter onto your wirelss video dispaly, just like a HUD. This allows you to quickly see some usefull infomation like battery voltage, distance from home, artificial horizon, altitude etc..
|

|