

This guide will talk about the flight moves available to use with arducopter, and also give details on how to set them up.
There are 13 flight modes available in APM:Copter, 9 of which are regularly used. You can set these up by doing the following:
- Turn on your RC transmitter
- Connect the APM/PX4 to the Mission Planner
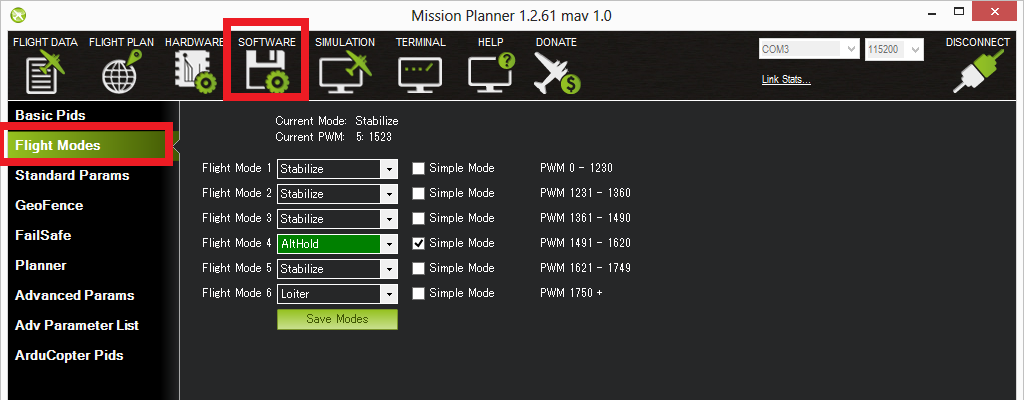
- Go to the Software > Flight Modes screen
- Note as you move your transmitter’s flight mode switch (channel 5) the green highlight bar will move to a different position.
- Use the drop-down on each line to select the flight mode for that switch position ensuring that at least one switch position is left assigned to Stabilize
- Optionally check the Simple Mode checkbox for that switch position (Simple mode is described here)
- When finished press the “Save Modes” button.
Overview of Arducopter Flight Modes
- Stabilize mode is the primary operating mode for flying APM:Copter and can be considered its manual flight mode. Stabilize automatically levels the multi-copter and maintains the current heading, while allowing the pilot full control over the throttle.
- In altitude hold mode, the copter maintains a consistent altitude while allowing roll, pitch, and yaw to be controlled normally. This page contains important information about using and tuning alt hold.
- In loiter mode, the copter maintains a consistent location, heading, and altitude. This can be adjusted by using the sticks on your transmitter.
- Position mode is the same as loiter mode, but with manual throttle control. This means that, in position mode, the copter maintains a consistent location and heading, while allowing the operator to control the throttle manually.
- In return to launch (RTL) mode, the copter navigates from its current position to hover above the home position. The behavior of RTL mode can be controlled by several adjustable parameters.
- In autonomous (auto) mode, the copter will follow a pre-programmed mission script stored by the autopilot, including autonomously navigated waypoints, commands, and events.
- In Acro mode the rate of rotation of the copter (roll, pitch and yaw) is controlled by the angle of the sticks. Ideal for stunt flying (not recommended for beginners) and it does not self level.
- Guided mode is a capability of APM:Copter to dynamically guide the copter to a target location wirelessly using a telemetry radio module and ground station application.
- When circle mode is engaged the vehicle will begin flying in a 10m radius circle (value can be set in the arducopter settings) with the nose of the vehicle pointed towards the center.
- LAND mode attempts to bring the copter straight down. This will land your copter and turn off the motors once its on the ground.
Stabilize Mode
Stabilize mode is the primary operating mode for flying APM:Copter and can be considered its manual flight mode. Stabilize automatically levels the multi-copter and maintains the current heading, while allowing the pilot full control over the throttle. Stabilize is good for general flying and FPV. The autopilot must always initially be set to stabilize mode in order to be able to arm the ESCs before takeoff. It is VERY important to be able to easily and rapidly switch back to stabilize mode from any other mode in order to regain control from any unexpected or undesirable flight behavior.
Moving the Pitch and Roll
Moving the Pitch and Roll
- Moving the (right) control stick in any direction will cause the copter to tilt and move in that direction.
- Releasing the Pitch and Roll control stick will cause the multi-copter to re-level itself.
- Input on the (Pitch and Roll) control stick is approximately equal to the angle of the copter.
- The default control angles are plus and minus 45 degrees.
- Prevailing wind is not automatically compensated for and the multi-copter will drift with the wind unless the operator counters with input on the Pitch and Roll control stick.
- Moving the (left) control stick left or right will cause the copter to rotate at a rate based on the amount of stick input.
- Releasing the (Yaw) control stick will cause the copter to record and maintain the new heading.
- The current heading is maintained automatically when the Yaw control stick is centered right and left.
- Moving the (left) control stick up or down will cause the copter to ascend or descend accordingly.
Altitude Hold Mode
When altitude hold mode (alt hold) is selected, the throttle is automatically controlled to maintain the current altitude. Except for automatic altitude maintenance, alt hold mode operates the same as in stabilize mode. Automatic altitude holding is a feature of many APM:Copter flight modes (such as loiter moder) and the information contained here pertains to those modes as well.
| In versions 2.9 and later of the APM:Copter firmware, accelerometer-based “inertial compensation” is also used to maintain altitude. This results in faster compensation and more accurate altitude maintenance, but it also requires vibration damping for your flight controller mounting. Please read this vibration damping post for more information on vibration damping techniques. | 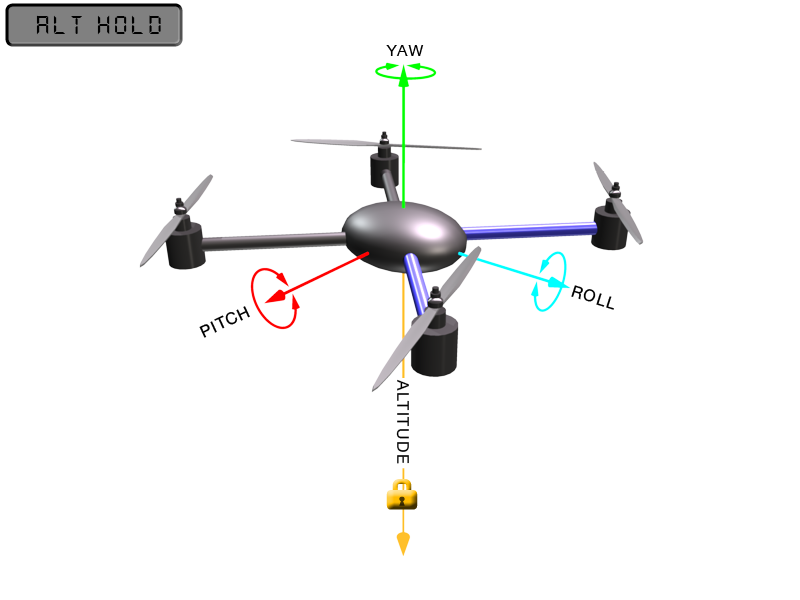 |
Its important to be in a stable attitude before entering altitude hold mode. While in alt hold mode, altitude can still be manually changed by raising or lowering the throttle control beyond a large central dead band. After using manual override to change altitude it is important to re-position the throttle stick back to as near your normal hover position as possible because altitude hold uses the RC transmitter throttle stick center position as the center point for all manual altitude adjustments. When you switch back to stabilize mode from any altitude holding mode, the copter will immediately go in the direction of any throttle stick displacement from the neutral hover position, potentially causing it to drop or rise at an alarming rate.
Warning You can not land and turn off the motors in any altitude holding mode. Always switch to stabilize mode to be able to land and disable the motors.
Warning You can not land and turn off the motors in any altitude holding mode. Always switch to stabilize mode to be able to land and disable the motors.
Loiter Mode
When switched on, loiter mode automatically attempts to maintain the current location, heading and altitude. Wind, PIDs and sensors will affect the effectiveness of maintaining position. The stronger the wind the greater the location deviation.
In loiter, the copter’s location can be manually adjusted with the control sticks.
While in loiter mode altitude can still be manually changed by raising or lowering the throttle control beyond a large central dead band. After using manual override to change altitude it is important to re-position the throttle stick back to as near your normal hover position as possible. When you switch back to stabilize mode from any altitude holding mode, the copter will immediately go in the direction of any throttle stick displacement from the neutral hover position, potentially causing it to drop or rise at an alarming rate. Remember that, in loiter, the throttle stick now adjusts the altitude, not the motors directly.
In loiter, the copter’s location can be manually adjusted with the control sticks.
- Horizontal location can be adjusted with the the Roll and Pitch control stick.
- The Heading can be reset with the Yaw control stick.
- Altitude can also be adjusted with the Throttle control stick.
While in loiter mode altitude can still be manually changed by raising or lowering the throttle control beyond a large central dead band. After using manual override to change altitude it is important to re-position the throttle stick back to as near your normal hover position as possible. When you switch back to stabilize mode from any altitude holding mode, the copter will immediately go in the direction of any throttle stick displacement from the neutral hover position, potentially causing it to drop or rise at an alarming rate. Remember that, in loiter, the throttle stick now adjusts the altitude, not the motors directly.
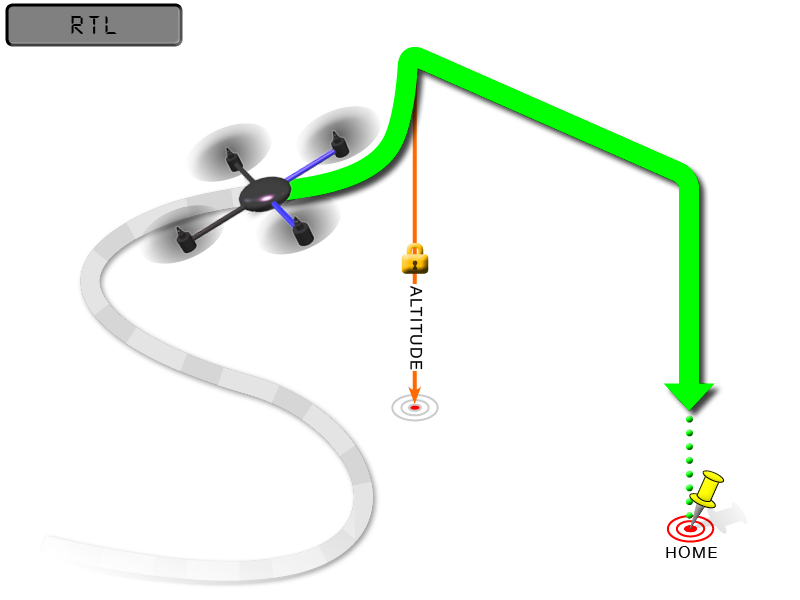
RTL Mode (Return to Launch)
When RTL mode is selected, the copter will return to the home location. By default the copter will first rise to at least 15m before returning home, or it will maintain the current altitude if it is higher, this value can be changed on the configuration settings of arducopter.
RTL is a GPS-dependent move, so it is essential that GPS lock is acquired before attempting to use this mode. Before arming, ensure that the APM’s blue LED is solid and not blinking. For a GPS without compass, the LED will be solid blue when GPS lock is acquired. For the GPS+Compass module, the LED will be blinking blue when GPS is locked.
RTL will command the copter to return to the home position, meaning that it will return to the location where it was armed. Therefore, the home position is always supposed to be your copter’s actual GPS takeoff location, unobstructed and away from people. For APM:Copter if you get GPS lock and then ARM your copter, the home position is the location the copter was in when it was armed. This means if you execute an RTL in APM:Copter, it will return to the location where it was armed.
RTL will command the copter to return to the home position, meaning that it will return to the location where it was armed. Therefore, the home position is always supposed to be your copter’s actual GPS takeoff location, unobstructed and away from people. For APM:Copter if you get GPS lock and then ARM your copter, the home position is the location the copter was in when it was armed. This means if you execute an RTL in APM:Copter, it will return to the location where it was armed.
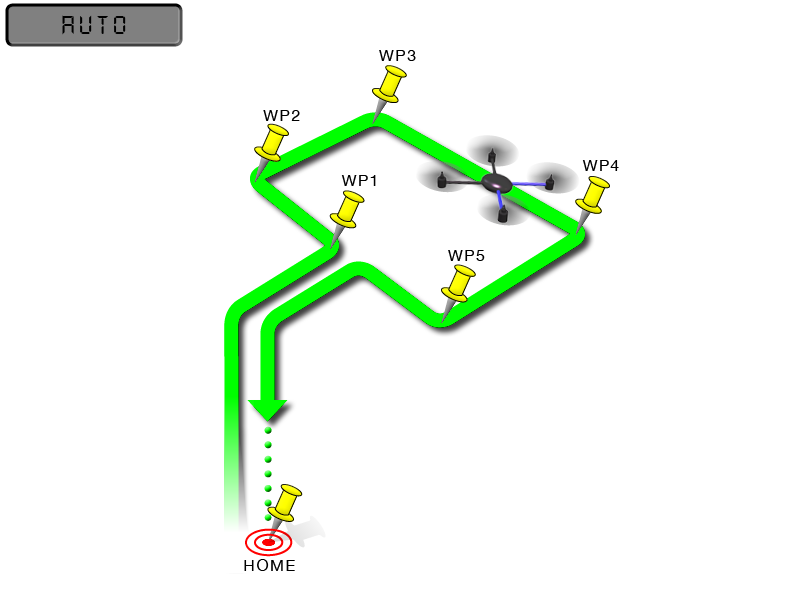
Auto Mode
Auto mode allows the copter to follow internal mission scripting to control its actions. Mission scripts can be a set of waypoints or very complex actions such as, takeoff, spin X times, take a picture, etc. For more details please read how to plan a auto mission for arducopter.
Guided Mode
Guided mode is not a traditional flight mode that would be assigned to a mode switch like other flight modes. The guided mode capability is enabled using a ground station application (such as Mission Planner) and telemetry radio (such as the 3DR Telemetry Radio). This capability allows you to interactively command the copter to travel to a target location by clicking on a point on the Mission Planner Flight Data map. Once the location is reached, the copter will hover at that location, waiting for the next target. Follow Me mode also uses Guided Mode to make the copter follow the pilot around the field.
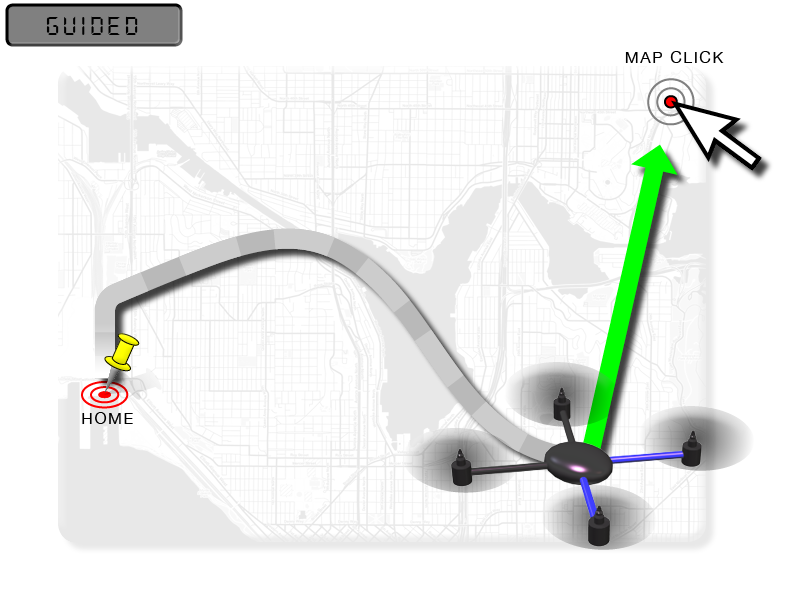
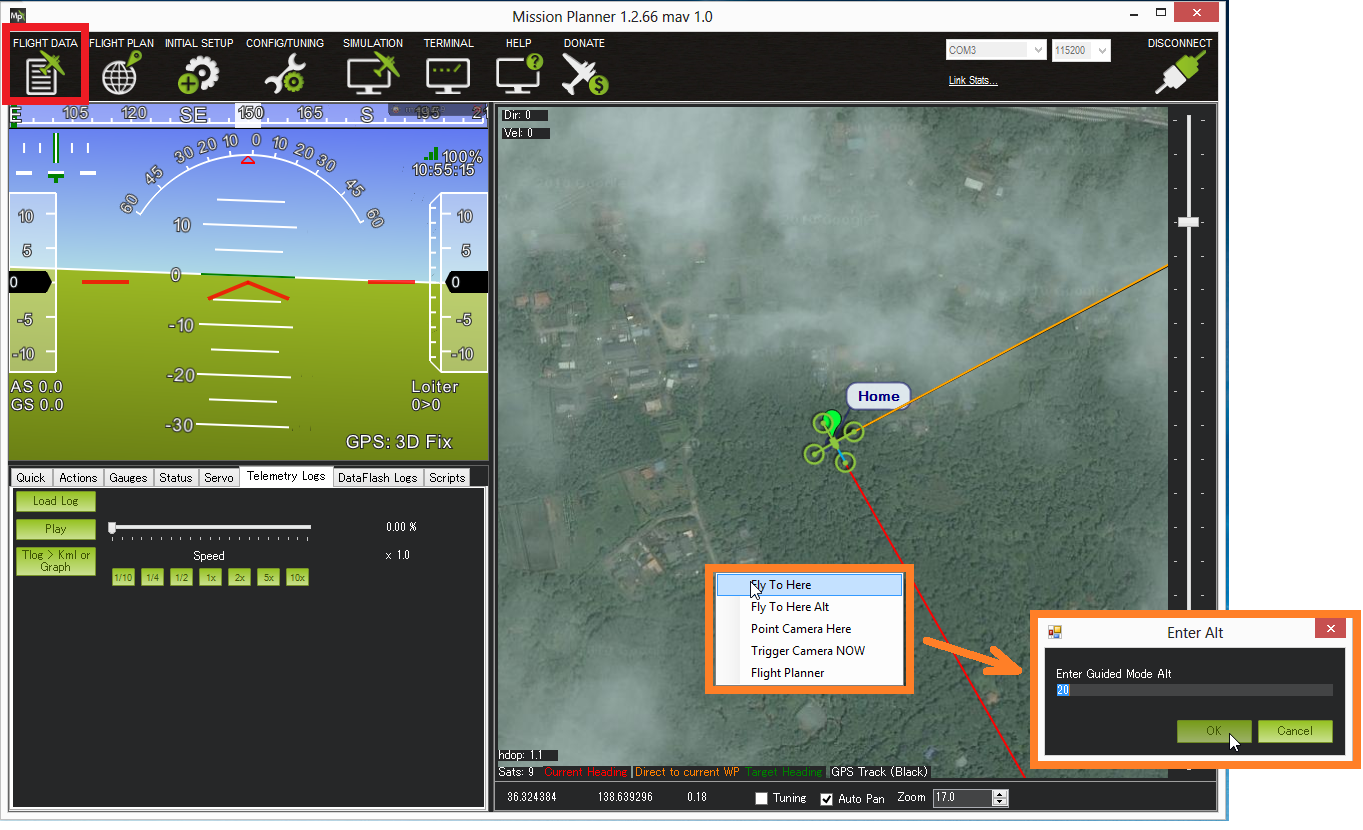 In the Mission Planner Flight Data screen map, try right-clicking on a nearby spot and select “Fly to Here”. |  A “Guided” target should appear on the map and the orange line (which indicates the target heading) should point to this guided target. |
 RSS Feed
RSS Feed