 Multicopters are easy to fly, can takeoff and land anywhere, and provide great platforms for using camera stabilization systems. With three arms and six motors, the Y6 configuration combines lightweight design, powerful lifting capacity, and in-flight redundancy for a versatile copter experience perfect for any application
 This guide will talk about the flight moves available to use with arducopter, and also give details on how to set them up.
 ArduCopter allows you to fly with a computer joystick sending commands via 3DR radio rather than a regular RC system. To use it, you must have the following:
 This guide will walk you through the assembly process of your Arducopter 3DR Hexa-B Frame. The 3DR ArduCopter Hexa is a stable and supported multi-rotor frame in the ongoing development of the ArduCopter codebase on DIYDrones. It features a very durable Aluminum and G10 FR4 frame that can withstand hard impacts. The wide legged stand allows for more stable takeoffs and landings and provides an unobstructed view for a bottom mounted camera. The main features of revision B, is that it has shorter arms which reduces the weight.  The Mission Planner, created by Michael Oborne, does a lot more than its name. Here are some of the features:
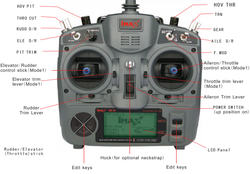 If you want to have six modes, you'll probably have to configure your RC transmitter to do this. That's usually accomplished by mixing a two position switch and a three position switch on your transmitter. Set your switch(es) to (ideally) produce PWM pulse widths of 1165, 1425, and 1815 microseconds or 1165, 1295, 1425, 1555, 1685, and 1815 milliseconds. (You can also do this with an analog dial, if you have one, but it's hard to reliably turn it to just the right position for six distinct settings).
 Arducopter has an inexpensiveOSD board called MinimOSD. It reads all the MAVLink data in the APM telemetry stream and overlays it on the video stream if you're using an on-board camera and wireless video transmitter. This is useful if you're flying in First Person View (FPV) mode or don't want to use a laptop at the field to see your telemetry data in the Mission Planner.
 This guide will show you how to configure the settings and calibrate arducopter so that you are ready for your first flight |
Categories
All
|
|
|

|


 RSS Feed
RSS Feed